A representative slice of our work. Many engagements are under NDA and are not listed here — ask us about adjacent capabilities.
Each tile opens a full write-up — overview, specifications, and how it works. Many engagements are under NDA and are not listed here; ask us about adjacent capabilities.
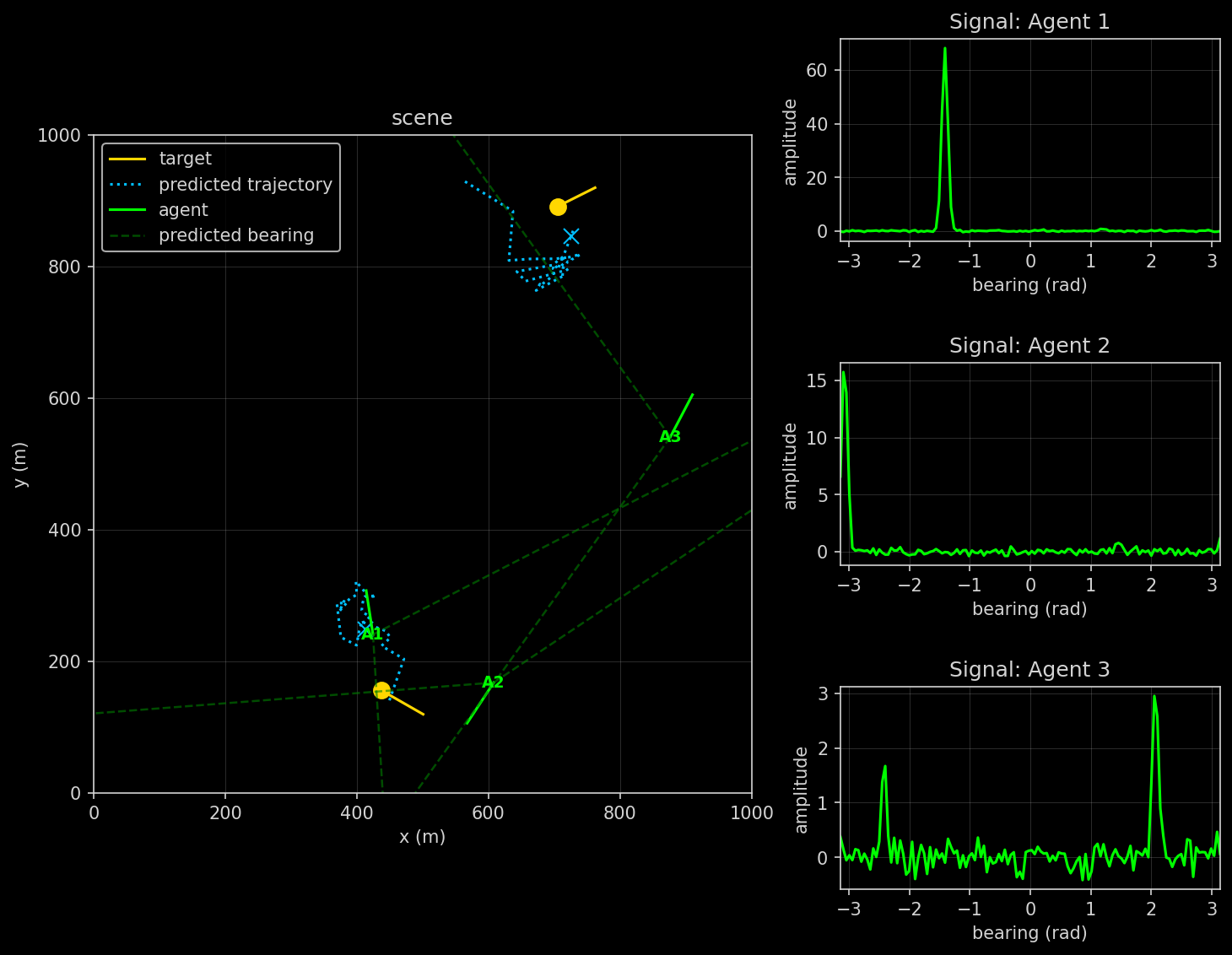
Long-range passive sonar target tracking from per-agent range-amplitude signals — a novel RNN predicting position and bearing angle, sharpening over time.
View project →Cooperative target tracking from fused multi-agent sonar imagery — several agents converge on a moving target across the scene.
View project →
A convoy-mounted 360° camera dome that detects, tracks, and cues a robotic firearm to mitigate hostile drones across the full sky.
View project →A hands-free, edge-deployable voice assistant that commands unmanned ground vehicles through noise-resilient speech — offline, in DDIL environments.
View project →Each prototype has a private write-up with architecture, data sources, and benchmark numbers. Send a note and we’ll share what we can.